Background and Motivation
Transcranial Magnetic Stimulation (TMS) is a non-invasive neuromodulation technique that modulates brain activity by inducing electric currents through rapidly changing magnetic fields. TMS has demonstrated wide-ranging effectiveness in diagnosing neurological disorders, treating psychiatric conditions, and mapping brain function.
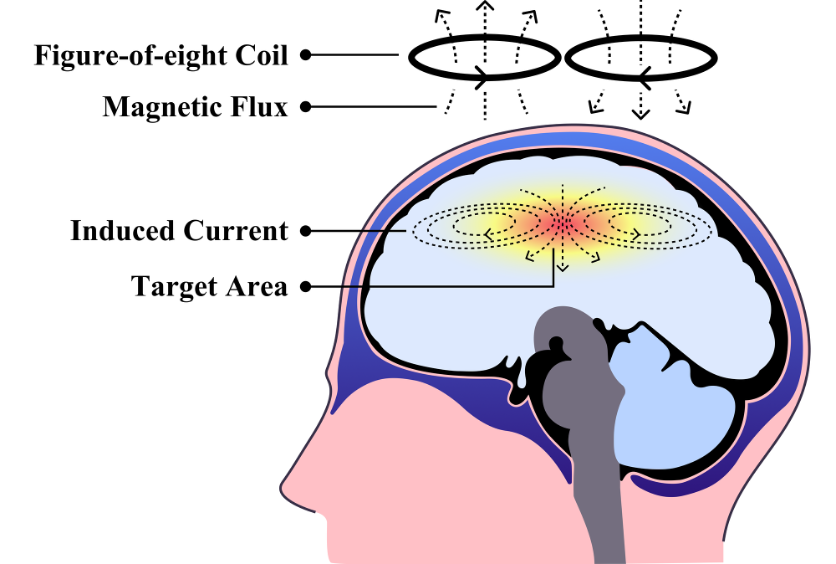
The principle of TMS
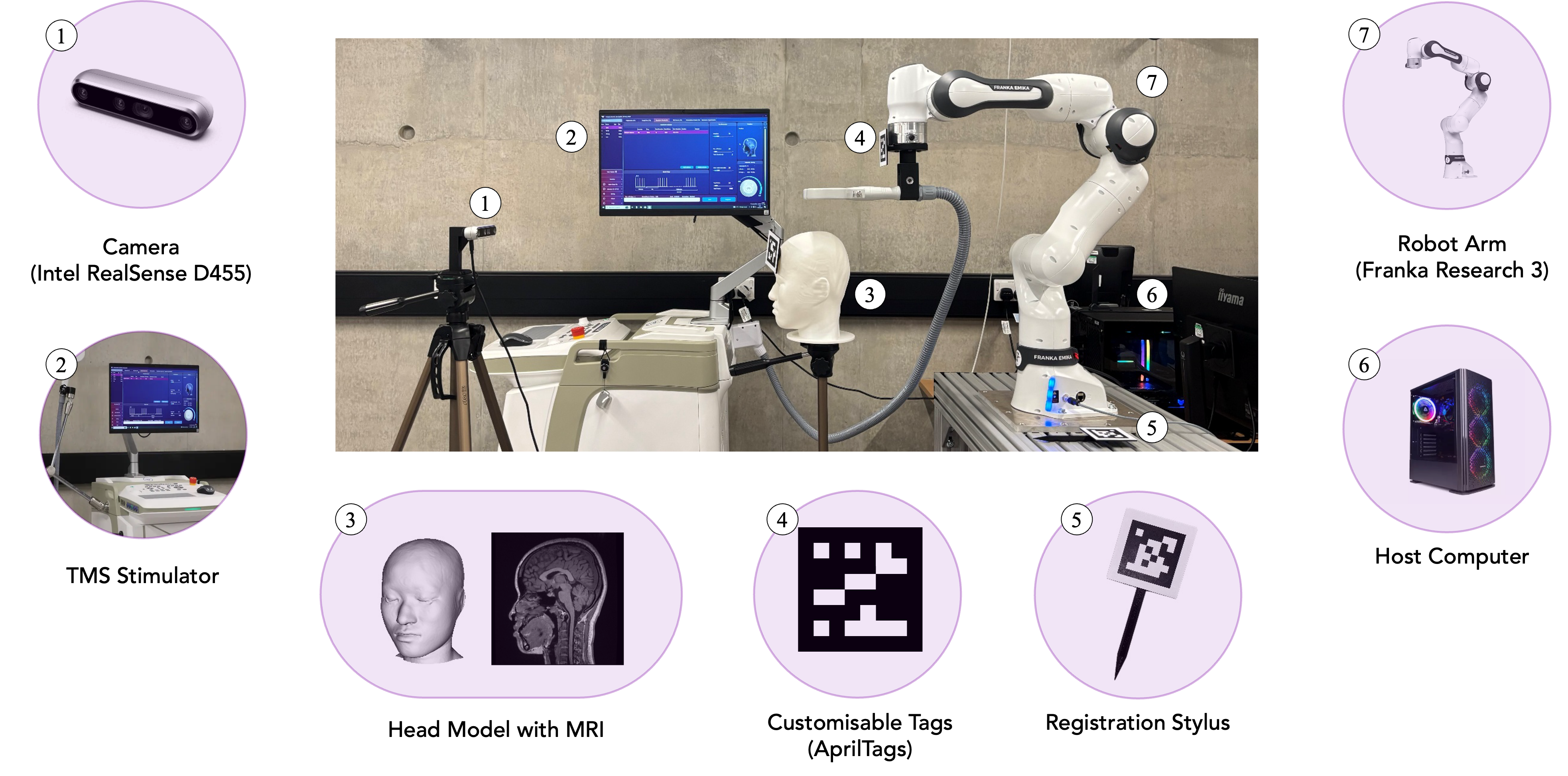
Compared with manual TMS, robot-assisted TMS (Robo-TMS) integrates neuronavigation, a robotic arm, and optical tracking to visualise stimulation targets, maintain precise coil positioning, and compensate for patient head motion in real time. This approach significantly improves targeting accuracy, treatment repeatability, and clinical consistency.
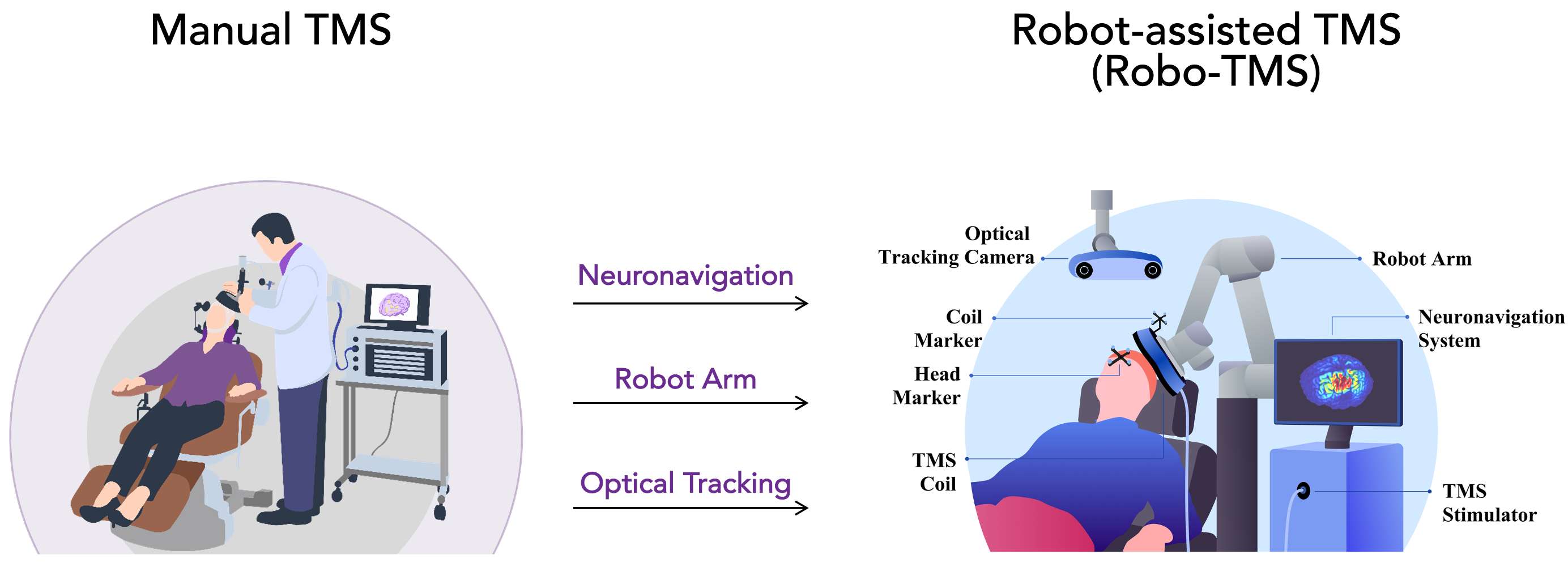
Comparison of manual TMS and RoboTMS
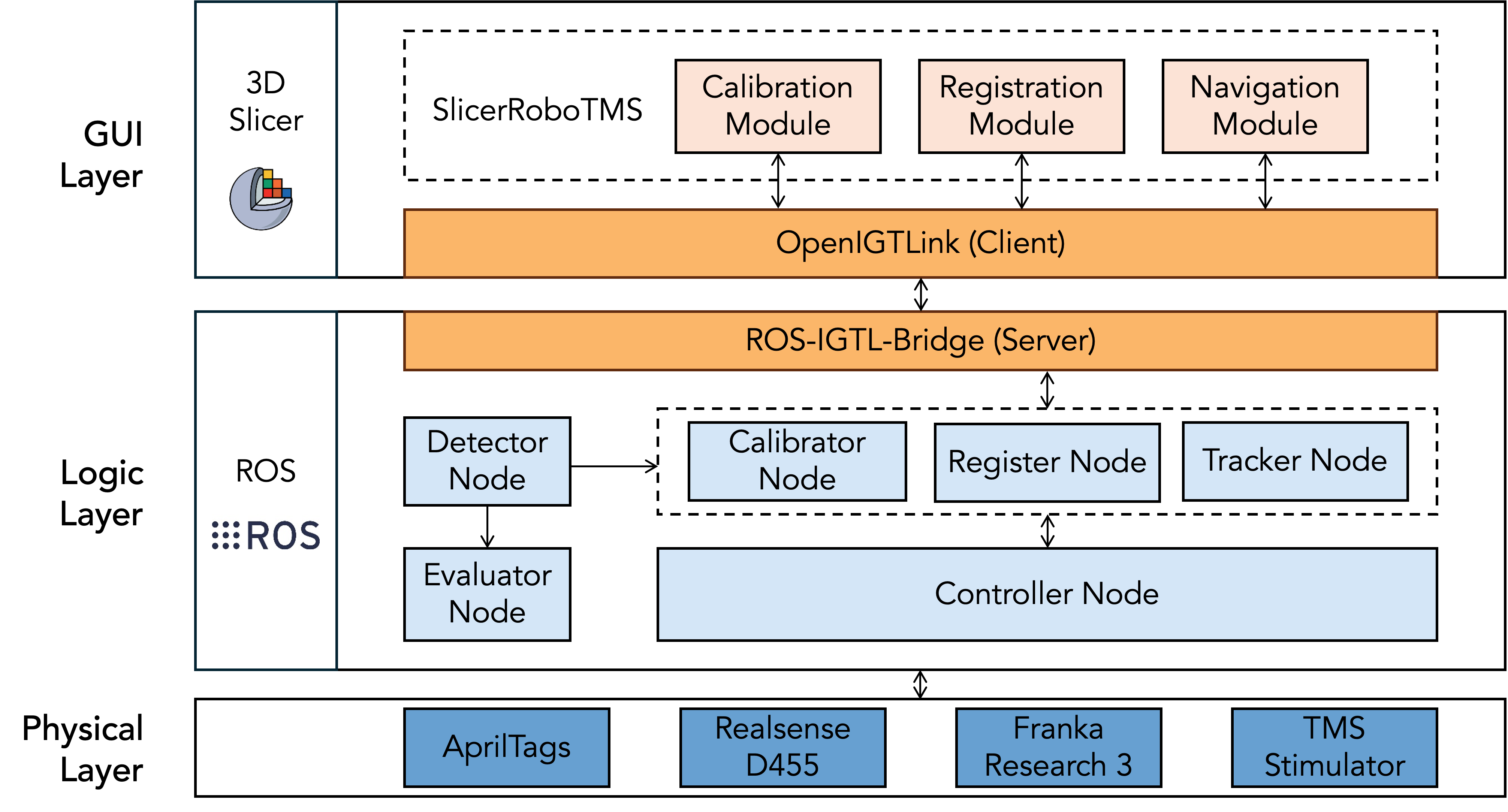
Despite its potential, advancing Robo-TMS technology requires broader research participation, which is currently hindered by the lack of an open platform. OpenRoboTMS addresses this gap by providing accessible hardware configurations, open and extensible software, essential algorithms, and standardised benchmarks—collectively lowering the barrier to entry and accelerating research and innovation.